

Sign Up for the Newsletter
The most up-to-date news and insights into the latest emerging technologies ... delivered right to your inbox!
Robots can walk in complex environments without needing sensors or control technology
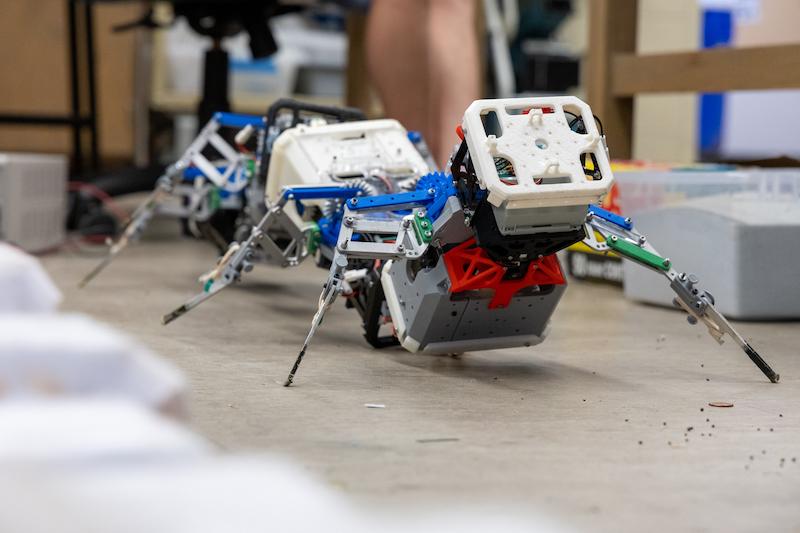
A new centipede-inspired robot has been unveiled, which researchers say could be deployed in agriculture, search and rescue and even space exploration.
Engineers from the Georgia Institute of Technology created a series of many-legged robots, and discovered the designs could move across uneven surfaces without additional sensing or control technology.
This element of the design makes them capable of moving over complex terrain, with the multitude of legs making the robot able to move over its surroundings without needing sensory information of its environment. If one leg slips, the motion of the others keeps it moving.
"With an advanced bipedal robot, many sensors are typically required to control it in real time," said Baxi Chong, study co-author. "But in applications such as search and rescue, exploring Mars, or even micro robots, there is a need to drive a robot with limited sensing. There are many reasons for such sensor-free initiative. The sensors can be expensive and fragile, or the environments can change so fast that it doesn't allow enough sensor-controller response time."
The designs were tested on uneven terrains constructed by the team, with the number of legs increasing by two each time, starting with six and ending with 16. The results found that the robot moved with increasing agility as its leg number increased. The robot was then taken outside for testing on real terrain.
"It's truly impressive to witness the multi legged robot's proficiency in navigating both lab-based terrains and outdoor environments," said Juntao He, robotics student. "While bipedal and quadrupedal robots heavily rely on sensors to traverse complex terrain, our multi-legged robot utilizes leg redundancy and can accomplish similar tasks with open-loop control."
The team is looking to apply its discovery to the agricultural industry, such as for weeding purposes.
Further development of the robotic design is planned, with the team looking at the optimum number of legs depending on the application.
You May Also Like






