

Sign Up for the Newsletter
The most up-to-date news and insights into the latest emerging technologies ... delivered right to your inbox!
Design helps robots move across uneven and unpredictable surfaces while avoiding obstacles
Developments in mobile robotics have boomed over the past few years, as researchers work to create designs for multiple surfaces, environments and purposes. Ensuring these robots can autonomously and easily move in a variety of terrains is essential to their wide-scale deployment, and a new navigation system hopes to provide a solution.
The system, developed by a team at the Russian Academy of Sciences and the National Research University Higher School of Economics in Moscow, uses a predictive path algorithm to help robots move across uneven and unpredictable surfaces while avoiding obstacles along the way.
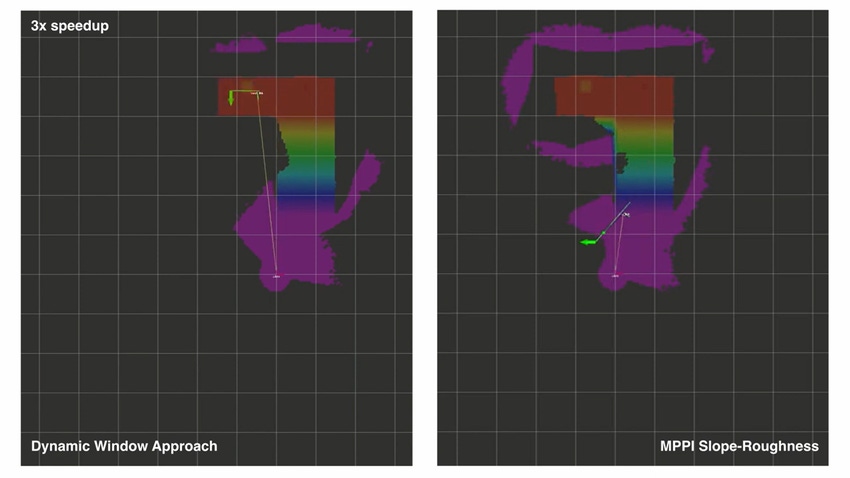
“Safe navigation in uneven terrains is an important problem in robotic research,” the team wrote. “We propose a 2.5D navigation system which consists of elevation map building, path planning and local path following with obstacle avoidance. For local path following we use the model predictive path integral (MPPI) control method.”
Specifically, the team deployed a model predictive path integral (MPPI) method. Developed in 2016, MPPI is an algorithm used to optimize non-linear paths. The team adapted the model to suit uneven terrain, using data gathered from elevation maps to support the robot’s path navigation.
“We use a local elevation map as an input for the MPPI algorithm,” they wrote. “MPPI is guided by terrain traversability values computed by this elevation map. These traversability values are computed from slope steepness, surface roughness and other parameters.”
The team tested the new system on a series of synthetic environments using three different elevation maps and a simulated robot, with several obstacles placed in the robot’s path; namely a cone, a ramp and pits. Results showed the robot could navigate the environment and reach the end goal with a nearly 100% success rate.
Real-world trials of the system are still needed before it can be deemed commercially viable, though the team hopes the new system could have use cases in robots needed for many environments, such as search and rescue, exploration and inspection.
You May Also Like

.png?width=700&auto=webp&quality=80&disable=upscale)
.png?width=700&auto=webp&quality=80&disable=upscale)
.png?width=300&auto=webp&quality=80&disable=upscale)
.png?width=300&auto=webp&quality=80&disable=upscale)

